在攻城狮眼里,传统车企怎样避免被出局?——传感器篇
本期的主题是自动驾驶的传感器系统解析,包括雷达、摄像头系统。
编者按:互联网造车的兴起、汽车智能化进程加快,对于传统车企都带来了或多或少的影响。身处行业不同位置的人,看法也各有差异。本文作者是一名汽车底盘工程师。他写下了自己的看法,欢迎大家一起讨论。本期的主题是自动驾驶传感器篇。
上一章笔者根据实际的生活场景,对自动驾驶做了一个前瞻性的路演。

根据上文和上图,可以看到无论是Volvo的City Safety、还是奥迪的Audi pre sense plus、本田的CMBS、奔驰的Pre-Safe等等各种系统,在当前其实都是一大堆技术合成而完成的工作。而这些名词大致可以分为三类:
泊车类:APA/AVM
预警类:FCW/LDW/BSD/ NV/FDS/RCTA/MOD
驾驶类:ACC/AEB/ TSR/LKA/ SAS/ IHC
那么,这些系统是通过什么来实现的呢?可能是雷达系统、高精度摄像头系统和集成式传感器系统。至少到目前为止,还没有更好的处理系统。
在《特斯拉、谷歌最怕的对手竟然是……》这篇文章中,Hacker天才George Hotz通过以下步骤就实现了“自驾车”:
第一步:George Hotz通过调试接口控制了本田车的中控系统,彻底接管了方向盘、油门、刹车;
第二步:在车顶安装了一个雷达,车的前后装了传感器和6颗摄像头,组成了行车视频识别设备:两颗位于后视镜,一颗位于车尾,左右两侧各一颗,车顶一颗则是大视角的鱼眼相机;
第三步:George Hotz用了现成的Intel NUC迷你主机作为车载服务器,外接一个21.5寸的Dell平板电脑作为输出显示,又拆了一个游戏摇杆安在变速杆的位置上,作为自动驾驶系统的启动开关。
最后,George Hotz只用了2000行软件代码,运行“自动驾驶系统”,完成了对汽车的无人驾驶。
George Hotz使用的也没有离开比这上面说的三个系统,那就让笔者简单介绍一下这三个系统。可能很多人认为传感器系统和雷达系统是同质的,为什么要分开来说?只能说雷达已经成为一个成熟的产品,并衍生出来很多不同的技术,所以分开来说。
传感器系统:
传感器基本上是大家耳熟能详的装置,在工业化的今天非常普及。不要说汽车,每个人的家庭里面也离不开传感器。尤其是智能化家居的出现,越来越多的传感器将会出现在我们生活的方方面面。而汽车同样需要智能化和自动化,传感器也会为汽车提供各种各样的支持。
单传感器:
传感器(transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。是实现自动检测和自动控制的首要环节。根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。
传感器的实现技术特别多,可以通过重量,电阻,电容,激光,霍尔,温度,生物,视觉,位移,压力,超声波,液位等特别多的常用物理特性来实现,这里就不一一叙述。
集成式多传感器:
通过字义就能理解,多传感器就是许多不同类型的传感器融合而成。实现的技术就是将不同的传感器融合在一起,实现更加强大的功能。所以这里主要说一下多传感器数据融合技术。
传感器数据融合的定义可以概括为把分布在不同位置的多个同类或不同类传感器所提供的局部数据资源加以综合,采用计算机技术对其进行分析,消除多传感器信息之间可能存在的冗余和矛盾,加以互补,降低其不确实性,获得被测对象的一致性解释与描述,从而提高系统决策、规划、反应的快速性和正确性,使系统获得更充分的信息。其信息融合在不同信息层次上出现,包括数据层融合、特征层融合、决策层融合。
1. 数据级融合:针对传感器采集的数据,进行同类数据的融合。
2. 特征级融合:根据提取所采集数据包含的特征向量,用来体现所监测物理量的属性。
3. 决策级融合:根据特征级融合所得到的数据特征,进行判别、分类,以及简单的逻辑运算,根据应用需求进行较高级的决策,是高级的融合。
集成式传感器系统是自动驾驶实现的基础,将来会衍生出越来越多的技术。
雷达系统:
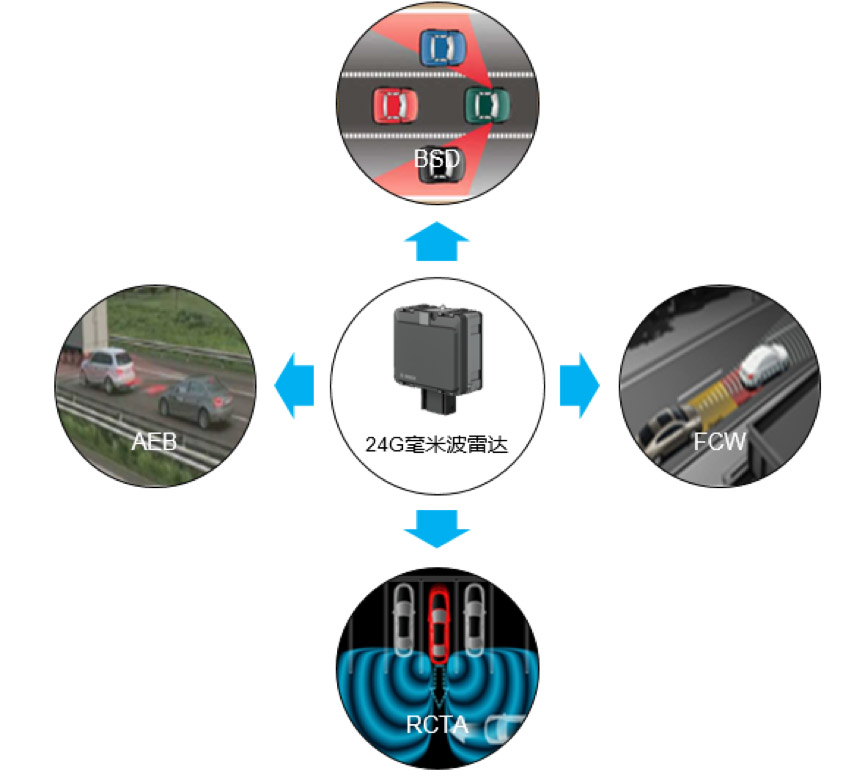
24GHz毫米雷达波:它能通过发射与接收频率为24.125GHz左右的微波来感应物体的存在,运动速度,静止距离,物体所处角度等,采用平面微带天线技术,具有体积小.集成化程度高.感应灵敏等特点。
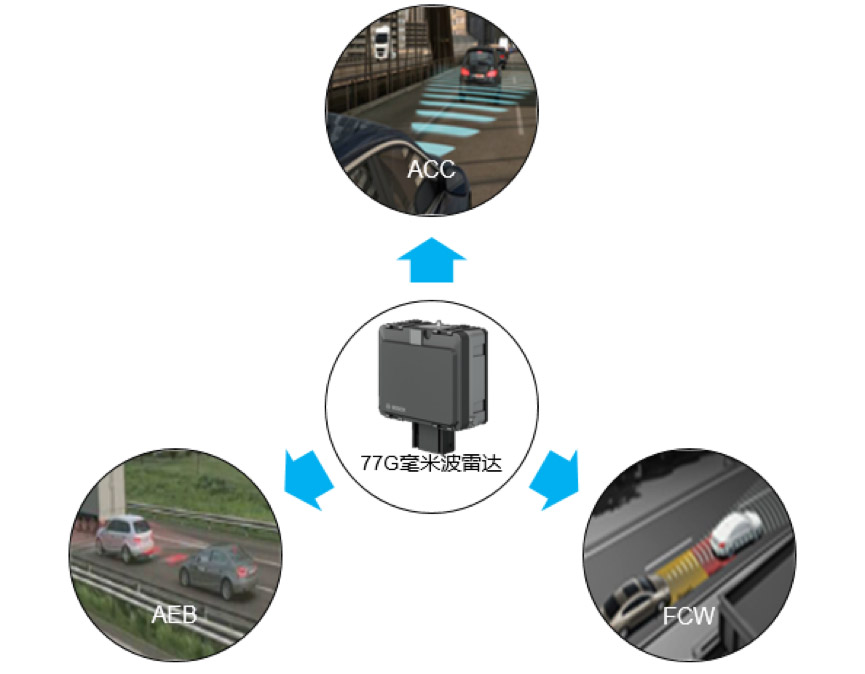
77GHz毫米雷达波:相比传统的24Ghz雷达传感器,77Ghz雷达传感器功能更加强劲,其目标识别率是24Ghz雷达传感器的三倍,测速和测距的精准率提高了三至五倍,传感器返回的测量数据可以帮助驾驶员了解与前车的距离。新型传感器设计更为紧凑,采用在全球范围内永久分配给汽车雷达装配的77Ghz频段,新型中距离雷达传感器特别适用于面向全球汽车市场的车型平台。开发需要以下的支持:
1.丰富的雷达系统和毫米波射频设计经验与能力。
2.77G毫米波雷达需要非常高的可靠性设计与验证过程。
3.77G毫米波雷达需要在足够小的体积下达到足够高的性能。
4. 77G毫米波雷达对成本的要求非常高。
5. 批量生产测试校准是个复杂的系统工程。
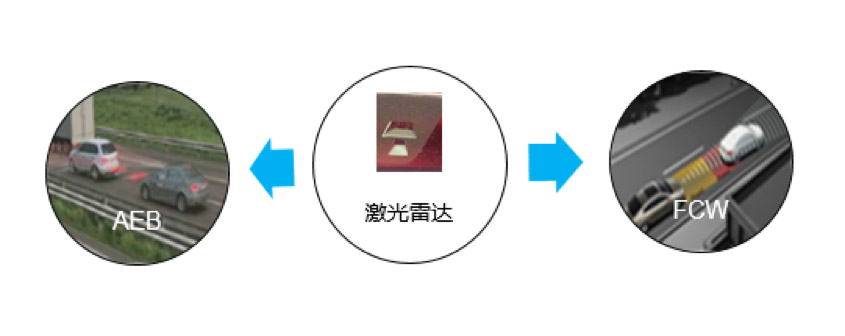
激光雷达: LiDAR(Light Detection and Ranging),是激光探测及测距系统的简称,LiDAR,类似于鲸鱼声呐、或是蝙蝠的发声器官,其原理是通过获取“光脉冲打在物体上并反射回到接收器的传播时间”,再根据光速已知的原理,将传播时间转换称LiDAR据测量物的距离。
也就是说,LiDAR在测距的精确性上很有优势。由发射系统、接收系统 、信息处理等部分组成。相对于毫米波雷达,具有分辨率高,隐蔽性好和抗干扰能力强,短距离探测性能好,体积小质量轻,成本低等特点。
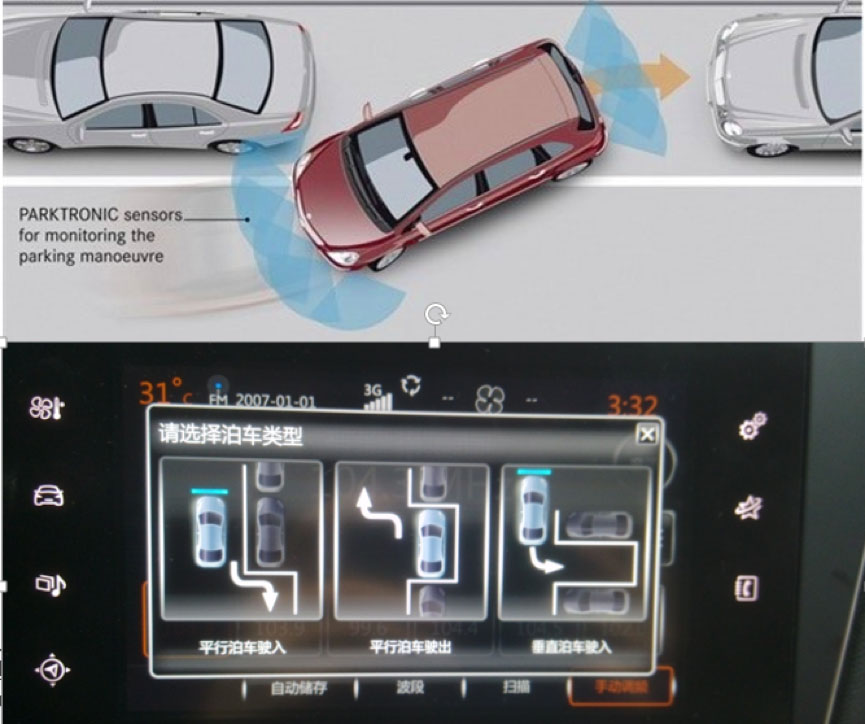
超声波雷达:超声波是频率高于20000赫兹的声波,它方向性好,穿透能力强,易于获得较集中的声能。超声波雷达适用于小于2米的精确定位,同时对于在传感器上有遮盖物等脏东西的时候,仍能较好的反馈距离。超声波雷达最初主要应用于倒车,而现在主要是自动泊车系统。
摄像头系统:
无论是集成式传感器系统还是雷达系统,都是传感器的融合技术的应用。笔者相信,随着科技的发展,越来越多的技术将自成系统,并广泛应用。但是,该系统不能直观的显示汽车周围的环境,所以摄像头系统出现了。
倒车影像:这是摄像头最初的应用。通过装置在车尾部的后视摄像头,驾驶员可以清楚看到车后方的实际环境,帮助驾驶员停车。

前视主动安全摄像头:
前视主动安全系统将逐渐成为五星安全等级车辆的必须配置。前视主动安全摄像头安装在前风挡玻璃后面,仅通过单目图像处理即可获取车道线,跟车车辆,会车车辆,前方行人,交通标志等多种交通目标信息。通过获取的交通目标信息,前视主动安全摄像头可以实现多种主动安全以及舒适功能,使车辆驾驶更加安全舒适。

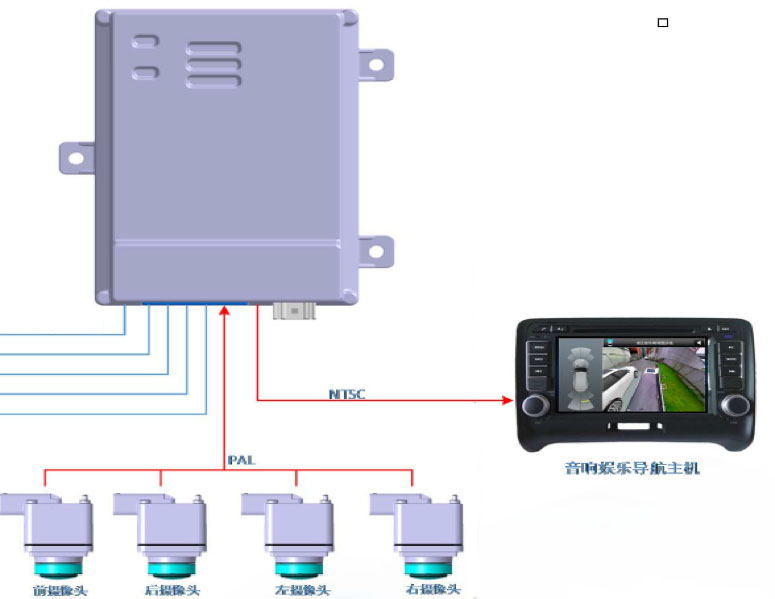
全景摄像头:360度全景(Virtual Reality,VR),就是通过技术或设备营造出出一个可交互的、真实的三维空间场景,显示车辆所在的周围环境。

红外摄像头:红外摄像头主要是通过红外线滤光片实现日夜转换,即在白天时打开滤光片,以阻挡红外线进入CCD,让CCD只能感应到可见光;夜视或光照条件不好的状态下,滤光片停止工作,不再阻挡红外线进入CCD,红外线经物体反射后进入镜头进行成像。现在主要应用于夜视系统。

摄像头还有很多的功能,譬如说疲劳监视、三维手势识别等功能。
可以说,传感器,雷达,摄像头,三者只有相辅相成,才是实现未来自动驾驶的基础。当然,这些系统收集来的数据,需要辨别,分析,并给出最终的处理指令,传递给整车的控制单元。而这些工作都离不开车脑(automobile brain)的处理。下一章,我们聊一聊车脑。
往期回顾链接:
在攻城狮眼里,传统车企怎样才能避免被出局?——运营商与图商篇
在攻城狮眼里,传统车企怎样才能避免被出局?——车内有线网络篇
在攻城狮眼里,传统车企怎样才能避免被出局?——车内无线网络篇
在攻城狮眼里,传统车企怎样才能避免被出局?——车联网安全篇(上)
在攻城狮眼里,传统车企怎样避免被出局?——车联网安全篇(下)
在攻城狮眼里,传统车企怎样避免被出局?——自动驾驶场景模拟分析篇

我要说
登录发布评论