激光雷达三部曲之——欧百拓剧学铭:用激光雷达搭建ADAS评测系统
- 剧学铭
- 2016/08/11
- 车云网
在ADAS和自动驾驶测试里,激光雷达评测与人工标定相比,要更省时,更准确,场景还原更完整。
车云按:8月4日-8月5日由车云和佐思产研联合主办的2016年自动驾驶汽车开发及测试技术研讨会在上海举行。Ibeo LiDAR-欧百拓CEO剧学铭在现场介绍了基于激光雷达的ADAS和自动驾驶测试方案。同时他在会上表示,德国Tier1采埃孚收购了Ibeo40%的股份,未来将助力Ibeo在新型3D固态激光雷达以及ADAS各项功能研发。本文由现场演讲整理而成。
 Ibeo LiDAR-欧百拓CEO剧学铭
Ibeo LiDAR-欧百拓CEO剧学铭
随着国内对无人驾驶的投入和研发的进一步深入,后面会有很多的测试工作,今天我讲的内容更偏重软件和测试。
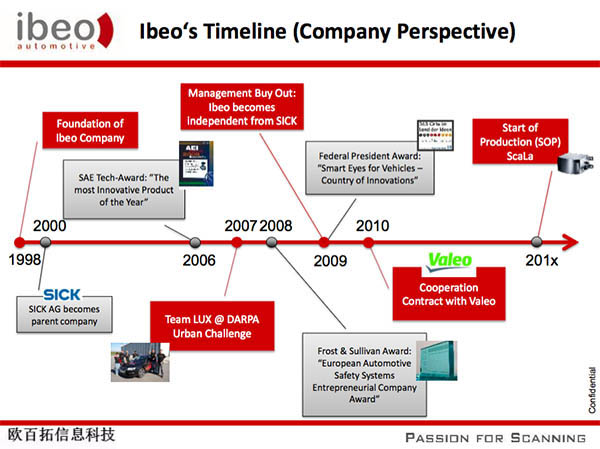
首先简单介绍一下Ibeo,Ibeo 1998年成立于汉堡,成立之初就专注在车载激光雷达的应用上。2000年被工业传感器公司SICK并入,作为SICK的车载激光雷达部门,同SICK携手近十年。2009年现Ibeo总裁把车载激光雷达部门买断,成为了一家独资公司。现在Ibeo还和SICK保持友好关系,但是已经是两家独立的公司。
2010年Ibeo和法国的Tier1法雷奥合作,开发面向未来量产车使用的激光雷达。预计明年年初,和法雷奥合作的ScaLa就要走向量产市场,首先可能会在奥迪上推出,装于奥迪A8车前。
几天前,德国Tier1采埃孚收购了Ibeo40%的股份,主要助力于Ibeo对新型固态激光雷达的研发。未来Ibeo可能会从单一的激光雷达软硬件供应商,进阶到对ADAS各项完整功能的开发。
简要介绍一下产品,上图集中了Ibeo成立至今的所有产品,从最早的Ibeo MOTIV – 360度整体旋转,到跟车厂结合,固定光源和接受器,只是有一个转镜的LUX和ScaLa。目前国内使用的主流的产品为LUX4线和8线,应用在众多无人驾驶和自动驾驶项目上。
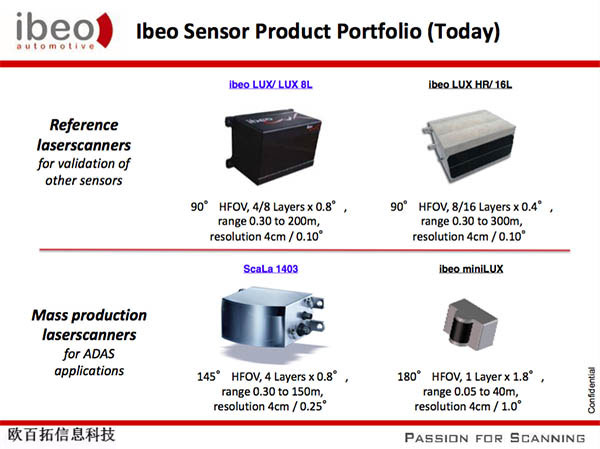
上图中包含明年年初量产,和法雷奥合作研发的ScaLa系列。在我们回国创业之前,这款产品是对国内禁售的,经过努力,目前国内自动驾驶走得比较前沿的公司,已经有机会拿到ScaLa的样件进行测试。刚才也提到Ibeo和SICK的关系,现在在Ibeo的系统中,也可以集成SICK的一线激光雷达。当然后续Ibeo也会开发自己的固态激光雷达。
Ibeo的方案非常德国化,初衷是满足车厂需求,很多人问:为什么最终量产的是4线?这是源于一轮一轮和车厂协商,满足车厂量产需要的基本性能和基本价格。
在安装上,实用性要达到车厂要求,不能安在车顶或其他位置成为一个突出部件,跟车身要有非常好的融合,从外观上来看,这种自动驾驶车或者具备ADAS功能车,就是一辆普通车辆,这也是Ibeo公司长期的设计理念。
下面给大家分享一个视频。
Ibeo不仅是做硬件研发,同时也会给用户提供自己的目标追踪识别算法。中间此车为本车,右边是供参考的摄象头影像,激光雷达收集的数据称为点云数据,Ibeo会在点云数据的基础上自动追踪识别分类路上的移动物体,这个车上装了4到6个4线激光雷达,我们可以获取它的速度信息、加速度、车辆等信息,在各种信息基础之上,对各种车辆进行分类,识别到底是卡车还是普通车,是行人还是自行车,这些功能都可以由Ibeo来提供给用户。在四类基础之外的,其他移动的物体,形状比较特殊,就归类为未知的物体。以上是目前Ibeo能做的分类,让大家通过视频对Ibeo整个测评系统有一个基础的认识。


一些Ibeo参与过的项目,从市场分布来讲,Ibeo的市场份额最大的还是在欧洲,其次是日本,去年中国无人车发展得比较快,目前是中国和北美占的市场差不多是并驾齐驱。

简单的案例分享,根据车不同型号和尺寸,和用户不同的需求,可以把激光雷达安装在不同的位置,但是不论安装在什么位置,原则上都需要跟车身融为一体。日本ZMP针对与奥运会的Robot Taxi,选取了五个Ibeo的激光雷达。上图是明年量产的奥迪A8,届时ScaLa的安放位置和这辆车应该非常类似。

这张是Ibeo的Roadmap,基本上分了三类,为Ibeo的目前和未来的主流产品,Ibeo的LUX系列,17年年初Scala量产,预计固态激光雷达的应该在2022年左右成熟。随着现在和采埃孚的合作,这个时间点可能会往前推移。
大家可能会问,明年ScaLa进入量产之后,LUX系列会不会淘汰?不会的,因为未来有大量的测试需求,为了满足测试要求,需要一套配有精度更高传感器、具有稳定系统的成熟方案,LUX会更多参与到测评系统里,从现在感知的功能转变为测评功能。

下面大家先看一下在无人驾驶和自动驾驶研发的过程中怎么做测评。以摄像头为例,我们需要对摄像头收集到的信息,进行大量线下的人工标定工作,需要工作人员线下一帧一帧捕捉图像中的行人、车辆等目标,这个工作量非常巨大,而且人为标定过程中还会出现一些错误,时间成本很高,局限性大,存在很多弊端。这里分享一个一个数字,今年德国某OEM,在对收集到的数据人工标定上的预算是2500万欧元,这是非常庞大的数字,同时大家也可以看到未来测试的重要性。

所以现在随着ADAS,无人驾驶的发展,研发中测试需求会更大,现在市面上需要一套更高效、更智能化,更低成本、更精准的测评系统。
Ibeo因为本身是激光雷达商,激光雷达最大的优点就是它的精确度,同时Ibeo有自己的算法,在此基础之上Ibeo开发了一套Ibeo Reference System,稍后我把此系统和人工标定做个比较,具体看有哪些优势。
首先这套测评系统有几个基本要求,第一,比人更准,第二,省时间,标定系统自动化程度越高越好,第三,标定后测试场景的还原一定要足够完整。为了满足这些要求,看一下Ibeo是怎么做到的。
先看一下激光雷达对物体的识别过程,这里是Ibeo自己的一套算法,在实时过程中怎么发现物体并做好分类。

此图是Ibeo ILV软件的界面。这是我们的本车,左前方和前方各安装了一个激光雷达,它的视角可以粗略认为是一百度,这个蓝色的视角,由第一个左前方的激光雷达覆盖,两根绿线范围内由右前方的激光雷达覆盖,通过融合看到前方大概170度左右,中间有一些重合区域。
激光雷达的原理就是通过光束的发出打到物体,进行反射弱信号收集。在某个方向收集到的信号反馈,认定该地区有可疑物体,激光雷达会持续对这个方向关注,观察物体是不是稳定的存在。如果是个雨滴,就会把它过滤掉,如果是一辆车,就会有稳定的信号回收。
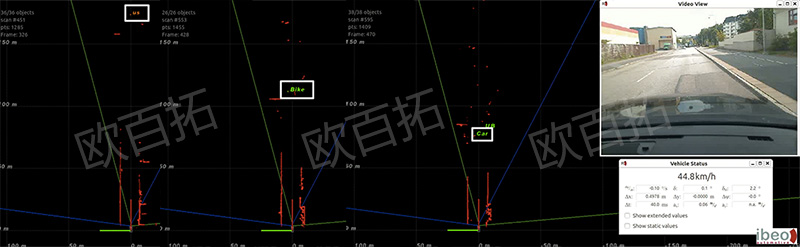
Ibeo LUX激光雷达的探测距离几乎可以达到200米,是随着距离变化逐步确定的过程。假设第一张图是T0时间,根据右边坐标,目标与车相距180米。第二张T1相距135米,目标物体与本车距离进一步拉近,在这个方向有持续的信号回收(持续多个周期),可以确定已经是一个物体,但是因为物体比较远,收集到的信息不够全,暂时判定为了一辆自行车。进一步往前推进,到T2距离大概75米,这里通过速度也好,通过外部尺寸也好,已经可以判定是辆汽车。这就是线上实时的探测分类物体的过程。
以下是完整视频。
测评的目的是做线下的分析,这套数据的记录都在计算过程中存有,可以按时间轴反推。它的原理是通过实时测试把数据收集下来,再用Ibeo的算法去倒推,经过处理再做测试回放的时候近距离确定的准确有效信息可以反推放在200米左右的位置。当用作线下评估时,就可以是一个很强大的工具。
这样和人工做标定,到底好在哪?
上面的视频不是做线下测评,是real time的回放,这里可以看到自行车被识别出来,远处也有一些信息收集,可以看到前面识别出的是一辆自行车,实际上距离拉近后发现是一辆车。实时探测过程中,初期因为距离太远,收集到的信息有限,不可避免的可能出现分类困难,当距离进一步拉近,对象的识别会更准确可靠,这是实时的过程中得到的从识别到分类的过程。
做测评的时候可以达成什么样的效果?上面是经过后处理后的效果。 因为可以持续追踪并识别出物体,就可以将最后识别的结果倒推,从而在200米外就可以知道车的长宽,分类等信息,行人在80-90米就可以准确识别。如果人工标定根本无法分辨这些远处物体,但是借助这套自动测评系统,在很远的地方就可以进行准确标注。
这在分析一个场景时,是一个很强大的工具,这套系统被前沿主机厂和Tier1广泛采用,对于无人驾驶开发,包括做摄像头、毫米波、激光雷达国内的团队,可以通过 reference system对单套或多套传感器,甚至融合之后ADAS的功能进行测评。

如果加上可以扫描出地线的激光雷达(和SICK合作,把1线激光雷达融入到系统中),可以看到车道线,同时对地面信息进行全部绘制,更完整地去还原驾驶场景。
这里包括其他车辆360度检测,不存在盲区和漏识,还有地线的标注,整套信息还可以为精确定位提供基础。
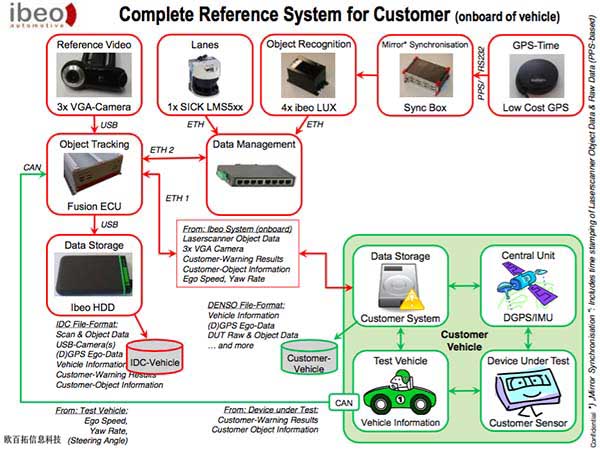
这是整套Reference System的基本组成,会用到Lux系列,4台到6台覆盖360度,然后融合1-2个Sick1线激光雷达,主要来识别车道线,把车道线精确绘制到场景中,然后配合1-2 个Reference camera。
做完同步后集成到ECU里做识别或者分类算法,处理完的数据可以提供给用户raw data或者object data做线上分析,即一边开车一边分析,也可以只把数据存储起来,开车把信息收集回来再做测评,这两项都可以通过这套系统全部完成。
Ibeo也跟ADAS测试模拟器企业合作,把实际测试到的数据路况读入到合作公司的模拟器中,这样模拟器中就可以使用的真实路况数据,把实时路测和模拟器分析融合在一起,大大提升做仿真和模拟的意义。

我要说
登录发布评论