激光雷达三部曲之——Quanergy汤劲松: 激光雷达的应用难点与坚守
- 汤劲松
- 2016/08/11
- 车云网
激光雷达技术难题的解决有待业内的共同合作。
车云按:8月4日-8月5日由车云和佐思产研联合主办的2016年自动驾驶汽车开发及测试技术研讨会在上海举行。Quanergy亚洲分公司负责人、中国公司总经理汤劲松从Quanergy公司的激光雷达产品出发,探讨自动驾驶领域激光雷达技术的发展现状、困难以及前景。本文由现场演讲整理而成。
 Quanergy亚洲分公司负责人、中国公司总经理汤劲松
Quanergy亚洲分公司负责人、中国公司总经理汤劲松
首先,激光雷达领域里面,全世界专攻这一技术的公司并不多。这是因为有很高的技术门槛,例如,雷达的测距范围大,从几十厘米到一百五十米, 而精度要做到厘米级。其次,这一技术涉及到很多技术领域,技术难度很大。
此外,关于我们很多国内专家谈到的产品技术国产化的问题。个人的观点是,在资本层面,其实外国公司和本土公司界限是很难明确的,更愿意关注公司所在地。比如,三星在美国有分公司,很多人就把这个公司当作美国公司,所以还是看待问题视角的区别。
论及激光雷达技术在自动驾驶的方向,分享一下目前为止的3D感知趋势,其中一个路径就是固态的。总的趋势是一定要实现产品的小型化、量产化、固态化,并且达到高可靠性和低成本。从这个趋势来看,未来无人驾驶汽车要实现量产化,全固态是唯一选择。
应用层面亟待解决的问题有哪些?
在更高层面系统上,这一技术应用前景非常广阔,不仅是汽车行业、智能家居等都会受益于这一技术。但现在目标主要是性能提升和成本控制。其中成本控制应该是业界专注传感、感知设备公司共同关注的问题。不解决成本高昂的问题,量产化无从实现。当然,成本的降低并不能依靠牺牲性能。那么如何实现?仅仅靠改进现有的技术是无法达到的,需要走一个突破行的新的技术途径,而固态激光雷达是一个最好的技术方向。
另外,既然是专注于自动驾驶,产品的可靠性很重要。既然目标是量产实用,产品的尺寸和重量也是需要解决。作为车体的一部分,并不能太大,另外功耗如果太高,散热就会影响性能。如何在不牺牲测距的范围、不牺牲性能的情况下降低功耗,这是行业内部都在思考的问题。我们希望我们的固态激光雷达能够解决这些问题。
激光雷达的技术难题这么多,为什么要坚持这一方向?
对比其他传感器,激光雷达的好处是能够提供3D信息,也不受晚上和恶劣天气的影响,此外视角比较大,能够达到360度。其他的传感器,例如camera一定是不可或缺的,但并不够,未来一定是会达成传感器的融合。
传统的激光雷达, 比较贵,另外比较大也比较重。未来我们的固态激光雷达能达到低成本和高性能,在可靠性得到极大提高的情况下,能够做成车体合一的产品。

来谈谈ADAS用的Sensors,应用包括盲点检测、ACC、车道保持等许多。从辅助驾驶到自动驾驶,到无人驾驶,这在技术上不是一个层级的,没有激光雷达远远达不到相应的状态。

从实验室到应用有很长的路要走
我们在测试上做了大量的工作,例如防磁、振动、防水等,实验室指标都很好,但在实际用的时候,到车上的时候情况非常不同。比如温度,达到了设定值,但最后发现实验环境跟实际环境不一样。这就需要我们做大量的产品的测试工作,大量的针对量产化的、产品的可靠性的工作。 这也是我们Quanergy在产品的性能和可靠性方面的对业界的承诺。
在这里稍微分享一下深度学习。车上装M8和摄像头,进行初步的融合和测试,然后在GPU上进行量化,效果不错。CES上也展示了,在仿真的雨水冲刷下M8不受影响。

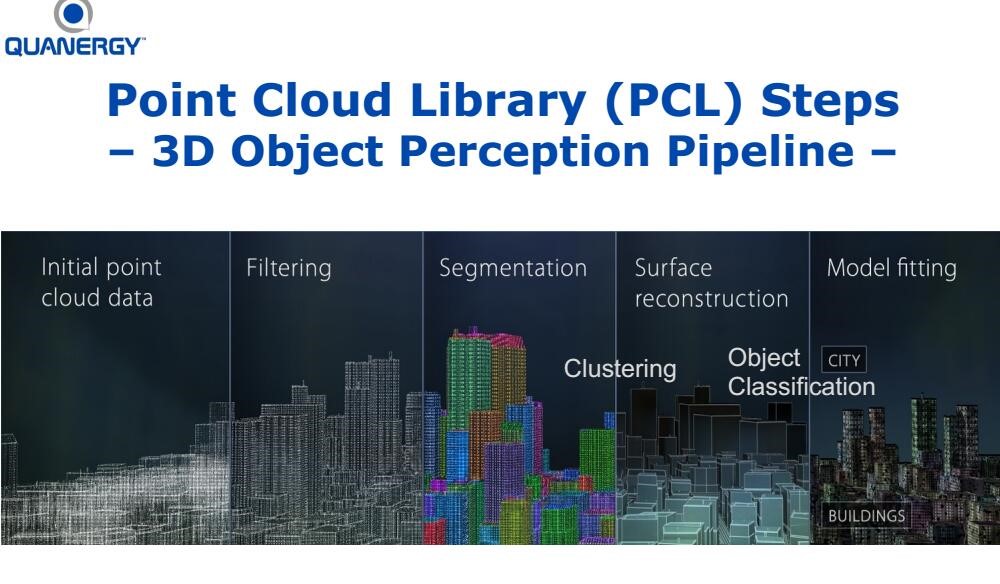
再来看下激光雷达的3D扫描功能。机器可以通过坐标信号进行特征提取,形成3D地图。然后同GPS照片合成,进一步完整。这一过程涉及软件开发,需要过滤信息,然后再进行模式的运算。我们希望,未来通过越来越多在路上的车,不需要采集原始的数据,数据能够自动采集并送上云端,这就对整个地图的生成有帮助。
要达成自动驾驶的目的,需要找到一个方案,需要合理安排各个传感器的协作,同时通过性能的提高,在提供足够性能的情况下,达成量产,这是未来的方向。

我要说
登录发布评论